
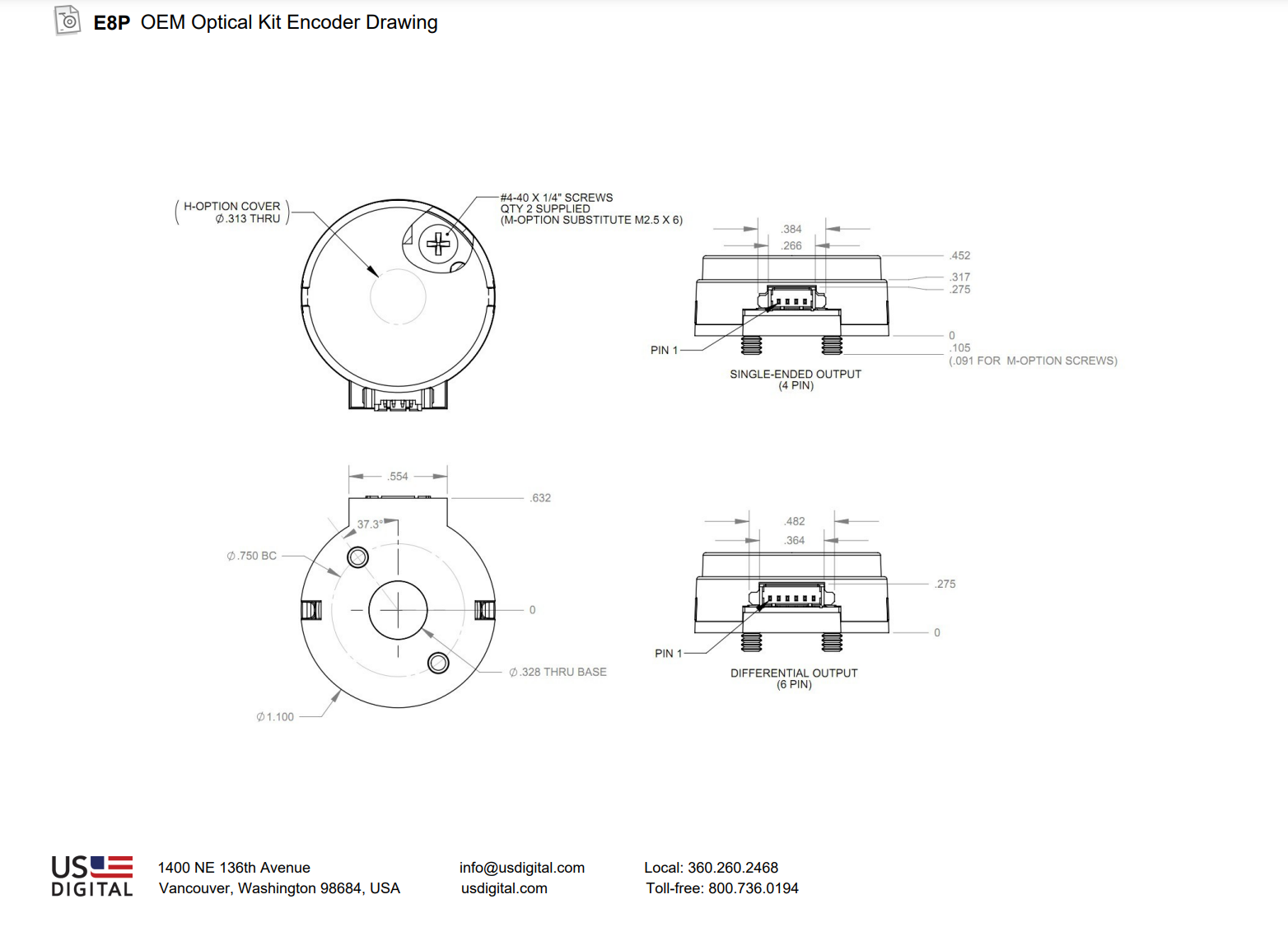
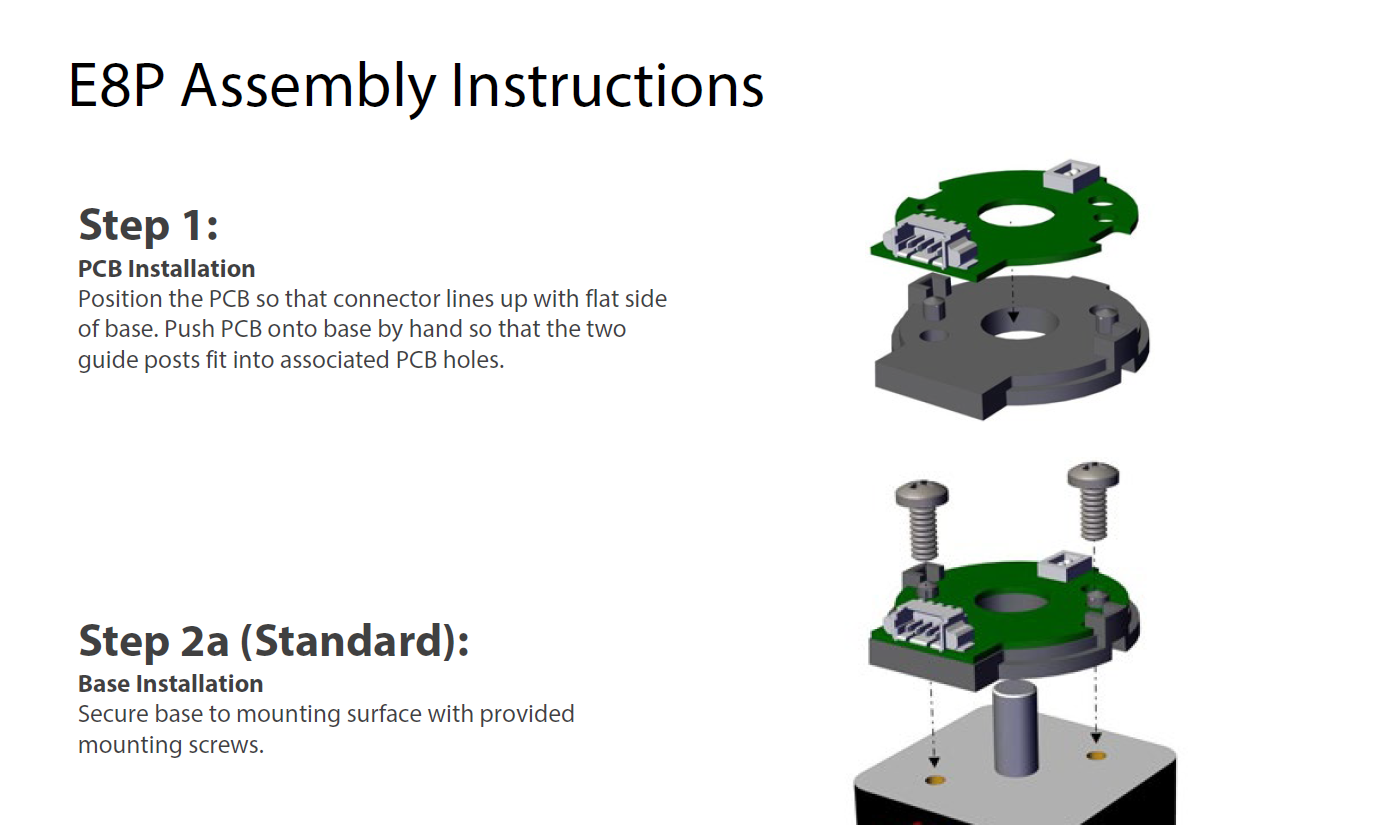
E8P OEM OPTICAL KIT ENCODER
THE E8P IS NO LONGER AVAILABLE FOR PURCHASE AND HAD BEEN REPLACED BY OUR E8T MINIATURE MOTOR ENCODER.

E8P Features
- Subminiature size, easy installation
- Single-ended or differential output option
- A and B quadrature TTL outputs
- Fits shaft diameters from 0.118 in. (3mm) to 0.276 in. (7mm)
- Accepts +/- 0.020 in. axial shaft play
- Off-axis mounting tolerance of 0.010 in.
- Count frequency from DC to 30 kHz
- 180 to 512 cycles per rev (CPR)
- 720 to 2,048 quadrature states per rev.
- Single +5V supply
See more info below
Configure the E8P